2.1 Dynamik – Newtons Axiome
1. Erstes Newtonsches Axiom: Ein kräftefreier Körper bewegt sich geradlinig gleichförmig, bzw. bleibt in Ruhe.
2. Zweites Newtonsches Axiom: Wirkt auf einen Körper
eine Kraft ![]() , so erfährt er eine Beschleunigung,
die proportional zur Größe der Kraft und indirekt proportional zu seiner Masse
ist
, so erfährt er eine Beschleunigung,
die proportional zur Größe der Kraft und indirekt proportional zu seiner Masse
ist
![]() ;
;
3. Drittes Newtonsches Axiom: Wenn Körper A auf
Körper B eine Kraft ![]() ausübt, so wirkt gleichzeitig auf
Körper A die gleich große, entgegengesetzt gerichtete Kraft
ausübt, so wirkt gleichzeitig auf
Körper A die gleich große, entgegengesetzt gerichtete Kraft ![]() (actio gegengleich reactio).
(actio gegengleich reactio).
4. Ein Bezugssystem, in dem die Newtonschen Axiome gelten, wird Inertialsystem genannt.
2.2 Dynamik – Kraft und Bewegung
1. Ein Newton (1N) ist die Kraft, die einem Körper der Masse 1 kg eine Beschleunigung von 1 m/s² erteilt.
2. Die Gleitreibung ist ein komplexes Phänomen,
wird aber näherungsweise durch eine Kraft F beschrieben, die geschwindigkeitsunabhängig
und nur von der Normalkraft ![]() und einer Materialkonstante
und einer Materialkonstante ![]() abhängt.
abhängt. ![]() heißt Gleitreibungszahl.
heißt Gleitreibungszahl.
![]()
![]() wirkt der Bewegungsrichtung entgegen.
wirkt der Bewegungsrichtung entgegen.
3. Für die Haftreibung
gilt: ![]()
(![]() : Haftreibungszahl)
: Haftreibungszahl)
4. Die elastische Rückstellkraft von Federn wird beschrieben durch das Hooksche Gesetz:
![]() ;
;
2.3 Beschleunigte Bezugssysteme und Scheinkräfte
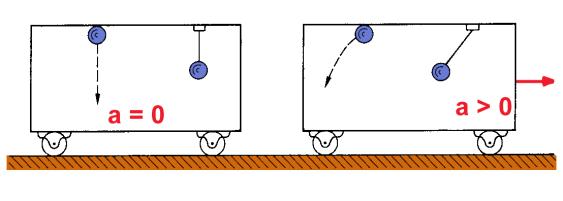
1. In beschleunigten Bezugssystemen wirken Scheinkräfte, die von der Beschleunigung des Bezugssystems abhängen. (Sie haben ihre Ursache in der Trägheit von Massen).
2. In einem linear beschleunigten Bezugssystem wirkt die Scheinkraft
![]() ;
;
![]() : Beschleunigung des Bezugssystems;
: Beschleunigung des Bezugssystems;
![]() : Masse des Körpers, auf den die Scheinkraft
wirkt.
: Masse des Körpers, auf den die Scheinkraft
wirkt.
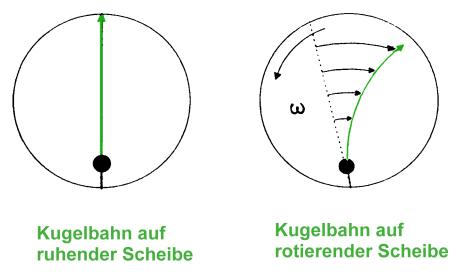
3. In einem rotierenden Bezugssystem gibt es 2 Scheinkräfte: Die Zentrifugalkraft und die Corioliskraft.
Die Zentrifugalkraft wirkt immer in rotierenden Bezugssystemen, die Corioliskraft wirkt bei bestimmten Relativbewegungen.
4. Die Zentrifugalkraft wirkt in einem rotierenden Bezugssystem in radialer Richtung, von der Drehachse nach außen gerichtet. Es gilt:
![]()
Die Zentrifugalkraft lässt sich auch vektoriell angeben:
![]()
Anm.:
Im rotierenden Bezugssystem gilt: Der Körper ruht in dem Bezugssystem, wenn
sich Zentrifugalkraft ![]() und Radialkraft
und Radialkraft ![]() kompensieren.
kompensieren.
5. Die Corioliskraft
Auf einen bewegten Körper wirkt im rotierenden Bezugssystem eine Kraft, die senkrecht zur Drehachse und senkrecht zur Relativgeschwindigkeit gerichtet ist. (Es zählt die Geschwindigkeitskomponente senkrecht zur Drehachse)
![]()